Let's install ROS2 Foxy(Humble) to Ubuntu 20.04 (22.04) LTS and play with the robot using turtlebot3 simulation.
Ubuntu 20.04
ROS2 Foxy
Follow the instruction from https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html it's so easy!
Ubuntu (Debian) — ROS 2 Documentation: Foxy documentation
Make sure you have a locale which supports UTF-8. If you are in a minimal environment (such as a docker container), the locale may be something minimal like POSIX. We test with the following settings. However, it should be fine if you’re using a differen
docs.ros.org
Turtlebot3 Foxy
Follow the instruction from https://emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/
Don't forget to select Foxy and begin with 3.1.3 section since ROS2 is already installed.

ROBOTIS e-Manual
emanual.robotis.com

Turtlebot3 Simulation Foxy
Follow the instruction from https://emanual.robotis.com/docs/en/platform/turtlebot3/simulation/

Run
ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py
(or ros2 launch turtlebot3_gazebo empty_world.launch.py)
(In new terminal,)
ros2 run teleop_twist_keyboard teleop_twist_keyboard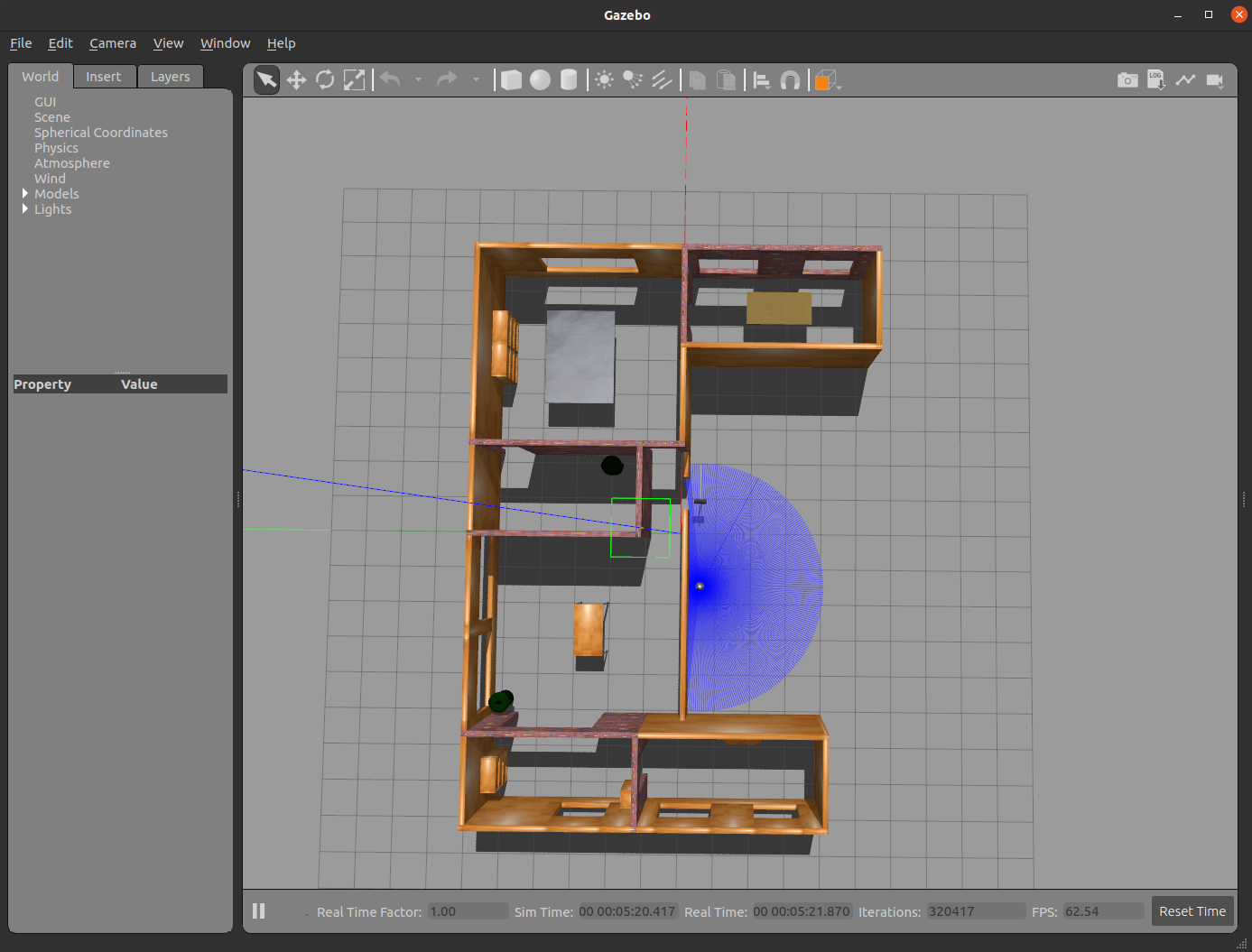
Troubleshoots
Problem
To use Cyclone DDS
Solution
sudo apt-get install -y ros-foxy-rmw-cyclonedds-cpp
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
Problem
[gzclient -2] X Error of failed request: BadValue (integer parameter out of range for operation)
Solution
install NVIDIA driver
Ubuntu 22.04
ROS2 Humble
Follow the instruction from https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html
Turtlebot3 Humble
Follow the instruction from https://emanual.robotis.com/docs/en/platform/turtlebot3/quick-start/ replacing foxy to humble
For example, sudo apt-get install ros-humble-gazebo-*
Troubleshoots
Problem
[ERROR] [1672108143.603458451] [spawn_entity]: Service %s/spawn_entity unavailable. Was Gazebo started with GazeboRosFactory?
[ERROR] [1672108143.603828040] [spawn_entity]: Spawn service failed. Exiting.
Solution
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/turtlebot3_ws/src/turtlebot3_simulations/turtlebot3_gazebo/models
Problem
[gazebo-2] process has died [pid 32212, exit code 255, ... gzserver
Solution
killall gzserver / killall gzclient
Docker
Humble Turtlebot3 Gazebo (X11)
Remember that ROS2 versions of Docker and Local PC must be same as it shares turtlebot3_simulations.
- docker pull osrf/ros:humble-desktop
- docker run --net=host --env="DISPLAY" --volume="$HOME/.Xauthority:/root/.Xauthority:rw" --volume="/home/ruben/turtlebot3_ws:/root/turtlebot3_ws" -it --rm --privileged osrf/ros:humble-desktop /bin/bash
- sudo apt update
- sudo apt-get install ros-humble-gazebo-*
- sudo apt install ros-humble-cartographer
- sudo apt install ros-humble-cartographer-ros
- sudo apt install ros-humble-navigation2
- sudo apt install ros-humble-nav2-bringup
- sudo apt install ros-humble-dynamixel-sdk
- sudo apt install ros-humble-turtlebot3-msgs
- sudo apt install ros-humble-turtlebot3
- echo 'export ROS_DOMAIN_ID=30' >> ~/.bashrc
- source ~/.bashrc
- (In new terminal) docker commit <container ID> <name>
- xhost +local:docker
- It causes protocol error without this line (or xhost -local:docker also causes protocol error)
- docker run --net=host -e DISPLAY=$DISPLAY --volume="$HOME/.Xauthority:/root/.Xauthority:rw" --volume="/home/ruben/turtlebot3_ws:/home/ruben/turtlebot3_ws" -it --rm --privileged <image_ID> /bin/bash
- the directory should be same otherwise it causes an link error.
- (in new terminal) docker exec -it <container ID> bash
- source /opt/ros/humble/setup.bash
- source /home/ruben/turtlebot3_ws/install/setup.bash
- export TURTLEBOT3_MODEL=burger
- ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- works properly in Foxy, but error on Humble
- (In humble) error log: Service %s/spawn_entity unavailable. Was Gazebo started with GazeboRosFactory?
- It does not work with 'export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:/home/ruben/turtlebot3_ws/src/turtlebot3_simulations/turtlebot3_gazebo/models'
Reference
'IT > Robot' 카테고리의 다른 글
| [Isaac Sim] Installation and Learning (0) | 2023.01.29 |
|---|---|
| [ROS2] Turtlebot3 (0) | 2023.01.22 |
| iGibson (0) | 2023.01.02 |
| [ROS2] Rosbridge_suite & websocket secure (1) | 2022.03.25 |
| [ROS2] CLOi ROS2 Simulator (2) | 2022.03.06 |